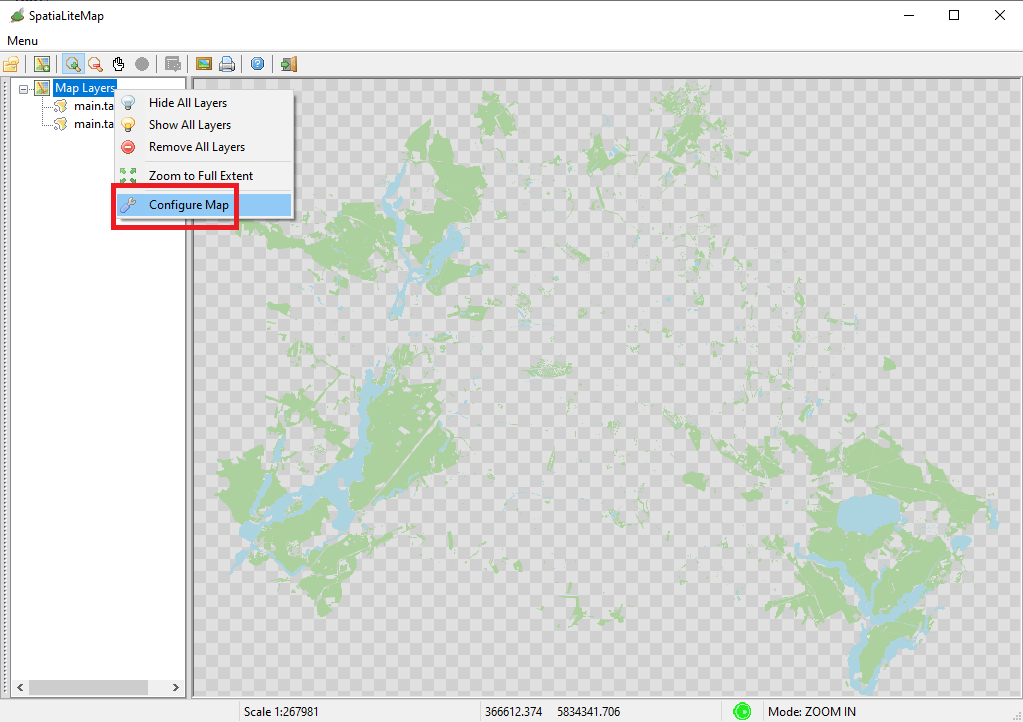
How to access the Map Global Options dialog:
- click the mouse right button over the root node Map Layers of the tree view control
- a context menu will then be shown
- click the Configure Map menu item
|
| 
|
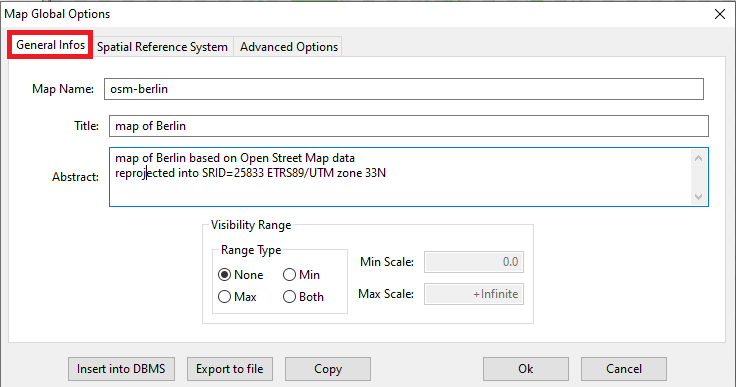
Very important
Never forget to set meaningfull descriptive data fully qualifying yoor Map.
Defining a clear and exhaustive Map Name, Title and Abstract just takes few seconds, but will siginificantly help to deliver a professional quality Map.
|
Note:
- More Map Configurations can be stored in the same database; they just have to be uniquely identified by their Map Name
- Pressing the Insert into DMBS button will permanently store the current Map configuration into the currently connected database.
- The Map Configuration itself is just another XML document: you can directly access it by pressing the Export to file or the Copy buttons.
|
| 
|
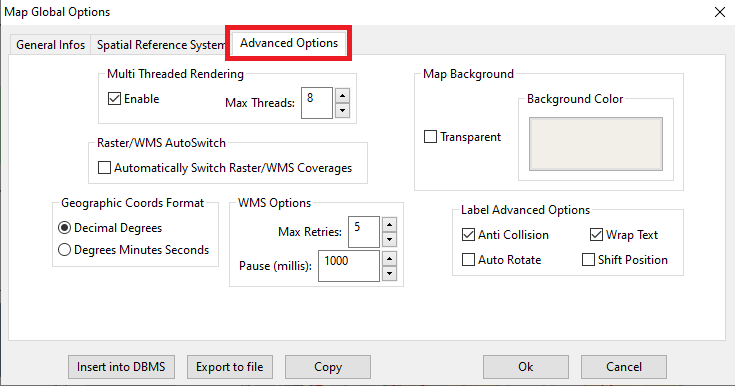
The most relevant configurable options affecting the Map as a whole are grouped together in the Advanced Options tab of the Map Global Options dialog.
- Multi Threaded Rendering
- If enabled the Rendering Engine of librasterlite2 will then activate parallel processing.
- This usually implies a remarquable performance boost.
- The more Threads you authorize to use, the faster the rendering will be.
- Be aware: authorizing too many Threads could lead to the paradoxically outcome of a slow rendering; be cautious.
- Warning: parallel processing may easily cause synchronization problems; prepare yourself to experience few random crashses from time to time. You are warned.
- Raster/WMS AutoSwitch
- Only meaningful for the Map Panel of the GUI
If enabled only a single Raster/WMS Background Layer could be visible at each time. In other words, switching ON a new Background Layer will automatically switch OFF any other Background Layer eventually supported by the Map.
- Geographic Coords Format
When using a geographic Reference System you can choose the format for displaying the currect coordinates:
- Decimal Degrees as e.g. 13.345239 52.571719
- Degrees Minutes Seconds as e.g. 52°34′18″N 013°20′43″E
- WMS Options
- If the Map contains one or more Cascading WMS Layers in case of failure an attempt to contact the WMS Server will be repeated for as much as Max Retries times after waiting for an interval of Pause milliseconds.
- Map Background
- By default the Map has a Transparent background.
- Alternatively you can opt for an opaque background: in this case just press the Background Color button then selecting some RGB color of your choice.
- Label Advanced Options
By default all Text Labels will be printed on the Map without applying any particular attention, this usually implying a messy caos of mutually overlapping Labels.
The following options can be activated in order to get a clearer and more easily readable Map:
- Anti Collision: Labels will never be allowed to mutually overlap.
The area still reserved by a previously defined Label will be always preserved and other Lables eventually overlapping will simply be discarded.
- Wrap Text: In the case of colliding Labels or of Lables not fitting inside their Polygon, and attempt will be made so to split the Label's text in two or three lines.
- Auto Rotate: in the case of colliding Labels an attempt will be made to rotate them until a free placement will be possibily found.
- Shift Position: in the case of colliding Labels an attempt will be made so to slightly displace them in both directions until a free placement will be possibily found.
|
|
Beware: too much aggressive Label Advanced Options could easily become real performance killers. By wise.
|
| 
|
|
Just for the sake of curiosity, what follows is the (partially collapsed) XML definition of the OSM Berlin Map.
<?xml version="1.0" encoding="UTF-8"?>
<!-- created by spatialite_gui on 2022-06-03 19:04:57 -->
<RL2MapConfig version="1.0"
xmlns="http://www.gaia-gis.it/RL2MapConfig"
xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance"
xsi:schemaLocation="http://www.gaia-gis.it/RL2MapConfig http://www.gaia-gis.it/RL2MapConfig_1_0.xsd" >
<Name>osm-berlin</Name>
<Description>
<Title>map of Berlin</Title>
<Abstract>map of Berlin based on Open Street Map data
reprojected into SRID=25833 ETRS89/UTM zone 33N</Abstract>
</Description>
<MapOptions>
<MultiThreading Enabled="true" MaxThreads="8" />
<WMS MaxRetries="5" Pause="1000" />
<MapCrs Crs="EPSG:25833" AutoTransformEnabled="true" />
<GeographicCoords DMS="false" />
<MapBackground Color="#f2efe9" Transparent="false" />
<RasterWmsAutoSwitch Enabled="false" />
<LabelAdvancedOptions AntiCollisionEnabled="true" WrapTextEnabled="true" AutoRotateEnabled="false" ShiftPositionEnabled="false" />
</MapOptions>
<MapBoundingBox MinX="391290.344009" MinY="5820276.025738" MaxX="393681.333621" MaxY="5822314.246391" />
<MapLayer Type="vector" DbPrefix="main" Name="forests" Visible="true">
<VectorLayerStyle>
<PolygonSymbolizer>
<Fill>
<SvgParameter name="fill">#add19e</SvgParameter>
<SvgParameter name="fill-opacity">1.00</SvgParameter>
</Fill>
</PolygonSymbolizer>
</VectorLayerStyle>
</MapLayer>
<MapLayer Type="vector" DbPrefix="main" Name="water_bodies" Visible="true">
...
</MapLayer>
<MapLayer Type="vector" DbPrefix="main" Name="agriculture" Visible="true">
...
</MapLayer>
<MapLayer Type="vector" DbPrefix="main" Name="buildings" Visible="true">
...
</MapLayer>
<MapLayer Type="vector" DbPrefix="main" Name="religion" Visible="true">
...
</MapLayer>
<MapLayer Type="vector" DbPrefix="main" Name="rivers" Visible="true">
...
</MapLayer>
<MapLayer Type="vector" DbPrefix="main" Name="cemeteries" Visible="true">
...
</MapLayer>
<MapLayer Type="vector" DbPrefix="main" Name="motorway" Visible="true">
...
</MapLayer>
<MapLayer Type="vector" DbPrefix="main" Name="trunk" Visible="true">
...
</MapLayer>
<MapLayer Type="vector" DbPrefix="main" Name="rd_primary" Visible="true">
...
</MapLayer>
<MapLayer Type="vector" DbPrefix="main" Name="rd_secondary" Visible="true">
...
</MapLayer>
<MapLayer Type="vector" DbPrefix="main" Name="rd_tertiary" Visible="true">
...
</MapLayer>
<MapLayer Type="vector" DbPrefix="main" Name="rd_residential" Visible="true">
...
</MapLayer>
<MapLayer Type="vector" DbPrefix="main" Name="paths" Visible="true">
...
</MapLayer>
<MapLayer Type="vector" DbPrefix="main" Name="cycleways" Visible="true">
...
</MapLayer>
<MapLayer Type="vector" DbPrefix="main" Name="subway" Visible="true">
...
</MapLayer>
<MapLayer Type="vector" DbPrefix="main" Name="rail" Visible="true">
...
</MapLayer>
<MapLayer Type="vector" DbPrefix="main" Name="light_rail" Visible="true">
...
</MapLayer>
<MapLayer Type="vector" DbPrefix="main" Name="tram" Visible="true">
...
</MapLayer>
<MapLayer Type="vector" DbPrefix="main" Name="suburbs" Visible="true">
...
</MapLayer>
<MapLayer Type="vector" DbPrefix="main" Name="railway_stations" Visible="true">
...
</MapLayer>
<MapLayer Type="vector" DbPrefix="main" Name="tram_stops" Visible="true">
</RL2MapConfig>
|